Разработка уникальных четвероногих роботов становится все более актуальной в мире робототехники. В то время как большинство производителей полагаются на электродвигатели, японские инженеры решили обратиться к самой природе и использовать принципы анатомии для создания нового робопса. Эта статья расскажет о том, как мышечные системы могут изменить подход к разработке роботов и какие перспективы открываются перед научным сообществом.
Электродвигатели против анатомии
Сегодня многие разработчики используют электродвигатели для создания подвижных конечностей роботов. Однако, настоящая анатомия животных предлагает гораздо более эффективные решения.
- Гибкость и универсальность: Мышечная система обеспечивает большую гибкость движений по сравнению с жесткими конструкциями из металла.
- Природные принципы: Изучение движений живых существ может помочь в создании более адаптивных и устойчивых роботов.
История разработки пневматических мышц
Концепция использования пневматических приводов была предложена еще более 70 лет назад. Разработчик Джозеф Маккибен создал эластичные трубки, которые имитируют сокращение мышц при заполнении воздухом или жидкостью.
- Актуаторы Маккибена: Эти устройства являются основой для создания современных роботизированных систем.
- Влияние на робототехнику: Использование таких приводов позволяет создать более естественные движения у роботов.
Преимущества японского прототипа
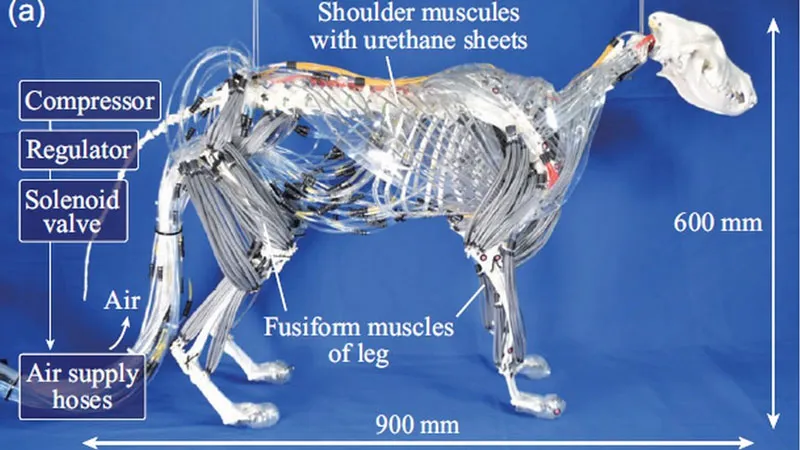
Японские инженеры создали прототип, который максимально точно воспроизводит анатомию собаки, используя 48 пневматических искусственных мышц. Это решение значительно увеличивает подвижность робота.
- Особенности конструкции: Конечности соединены с туловищем исключительно мышцами, без суставов, что улучшает длину шага.
- Проблемы с устойчивостью: Отсутствие суставов затрудняет удержание веса тела, что приводит к необходимости использования вспомогательной тележки во время испытаний.
Будущее разработки мягких тканей и суставов
Инженеры планируют дальнейшую оптимизацию своего прототипа. Создание суставных элементов и мягких тканей позволит роботу отказаться от вспомогательных структур и двигаться самостоятельно.
- Ускорение реакции мышц: Оптимизация пневмосистемы поможет увеличить скорость ходьбы.
- Применение в медицинских исследованиях: Такие разработки могут быть полезны для изучения возможностей животных и создания протезов.
«Подобные мускульно-скелетные роботы открывают новые горизонты в области биомедицинских исследований и робототехники.»
Таким образом, проект японских инженеров демонстрирует не только технологический прогресс, но и возможность использования опыта природы для создания высокоэффективных роботизированных систем. Будущее, где роботы смогут двигаться так же естественно, как живые существа — это реальность, которая уже на горизонте.



